
Publications
For the full publication list, please see my Google Scholar profile or the university repository.
Recent and Featured Papers
2025

Redundant Observer-Based Tracking Control for Object Extraction Using a Cable Connected UAV
IEEE/ASME transactions on mechatronics. (2025)
Proximal cooperative aerial manipulation with vertically stacked drones
Nature. (2025)
2024

A Monte Carlo Tree Search Framework for Autonomous Source Term Estimation in Stone Soup
2024 27th International Conference on Information Fusion (FUSION), pp. 1-8. (2024)
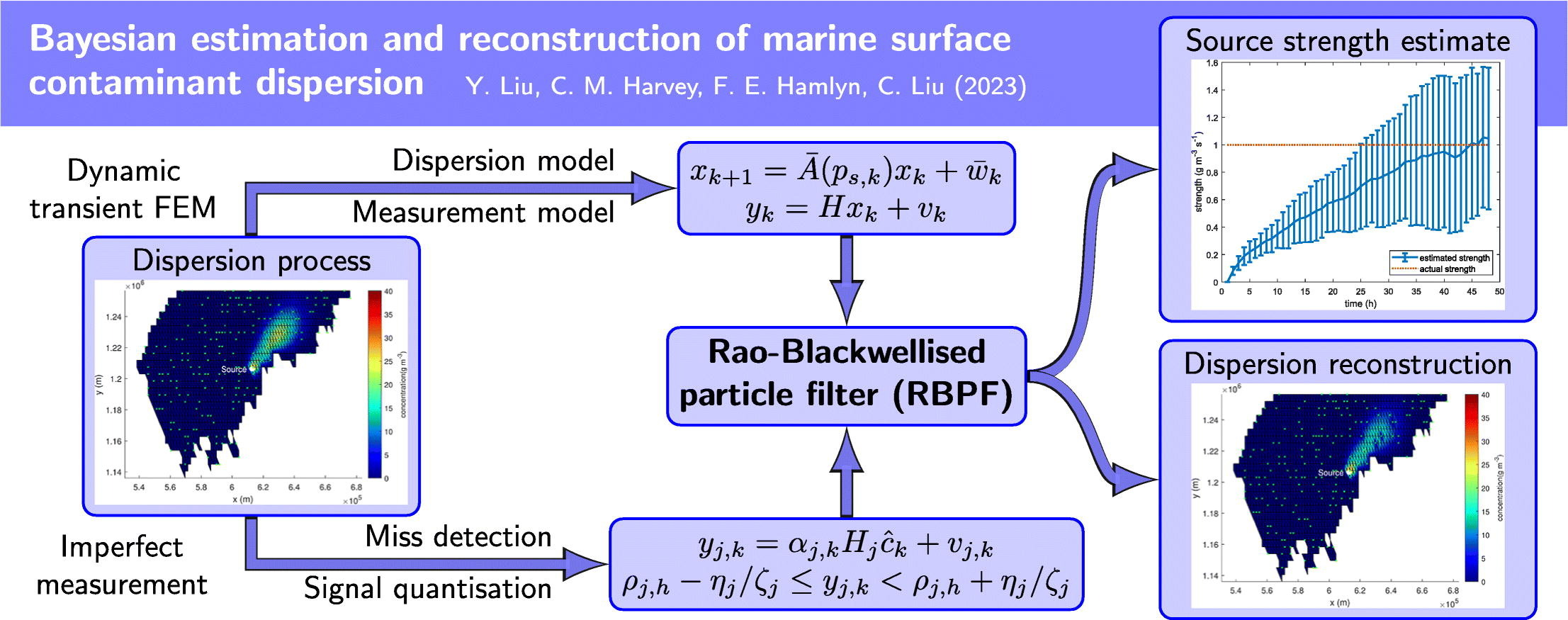
Bayesian estimation and reconstruction of marine surface contaminant dispersion
Science of the Total Environment, vol.907, pp. 167973. (2024)
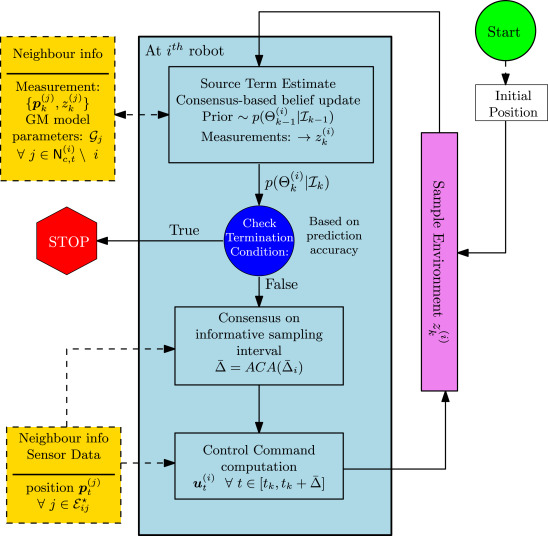
Distributed multi-robot source term estimation with coverage control and information theoretic based coordination
Information Fusion, vol.111, pp. 102503. (2024)

PointNetPGAP-SLC: A 3D LiDAR-based Place Recognition Approach with Segment-level Consistency Training for Mobile Robots in Horticulture
IEEE Robotics and Automation Letters, vol.9, pp. 10471-10478. (2024)
2023
Structurally aware 3D gas distribution mapping using belief propagation: a real-time algorithm for robotic deployment
IEEE Transactions on Automation Science and Engineering, vol.21, pp. 1623-1637. (2023)
Generalized data-driven optimal path planning framework for uniform coverage missions using crop spraying UAVs
Precision Agriculture, vol.24, pp. 1497-1525. (2023)
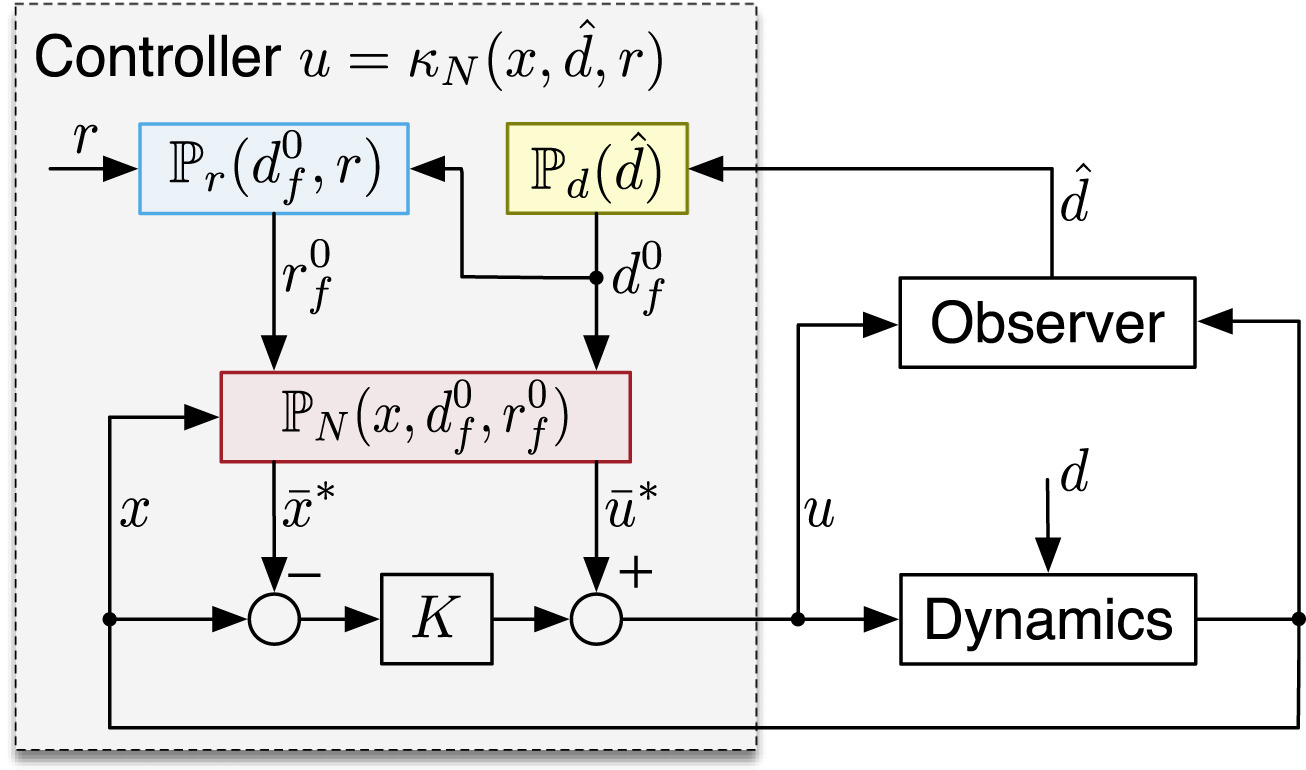
Surviving disturbances: A predictive control framework with guaranteed safety
Automatica, vol.158, pp. 111238. (2023)
2022
Autonomous source term estimation in unknown environments: From a dual control concept to UAV deployment
IEEE Robotics and Automation Letters, vol.7, pp. 2274-2281. (2022)
2021
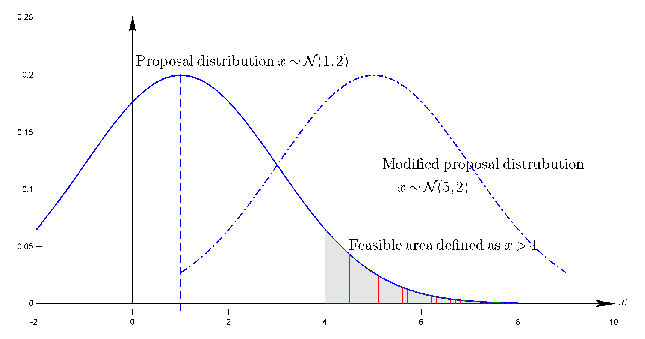
Dual control for exploitation and exploration (DCEE) in autonomous search
Automatica, vol.133, pp. 109851. (2021)
2020

Optimal path following for small fixed-wing UAVs under wind disturbances
IEEE Transactions on Control Systems Technology, vol.29, pp. 996-1008. (2020)
2019
Particle filtering with soft state constraints for target tracking
IEEE Transactions on Aerospace and Electronic Systems, vol.55, pp. 3492-3504. (2019)

Unmanned aerial vehicle-based hazardous materials response: Information-theoretic hazardous source search and reconstruction
IEEE Robotics & Automation Magazine, vol.27, pp. 108-119. (2019)
2018
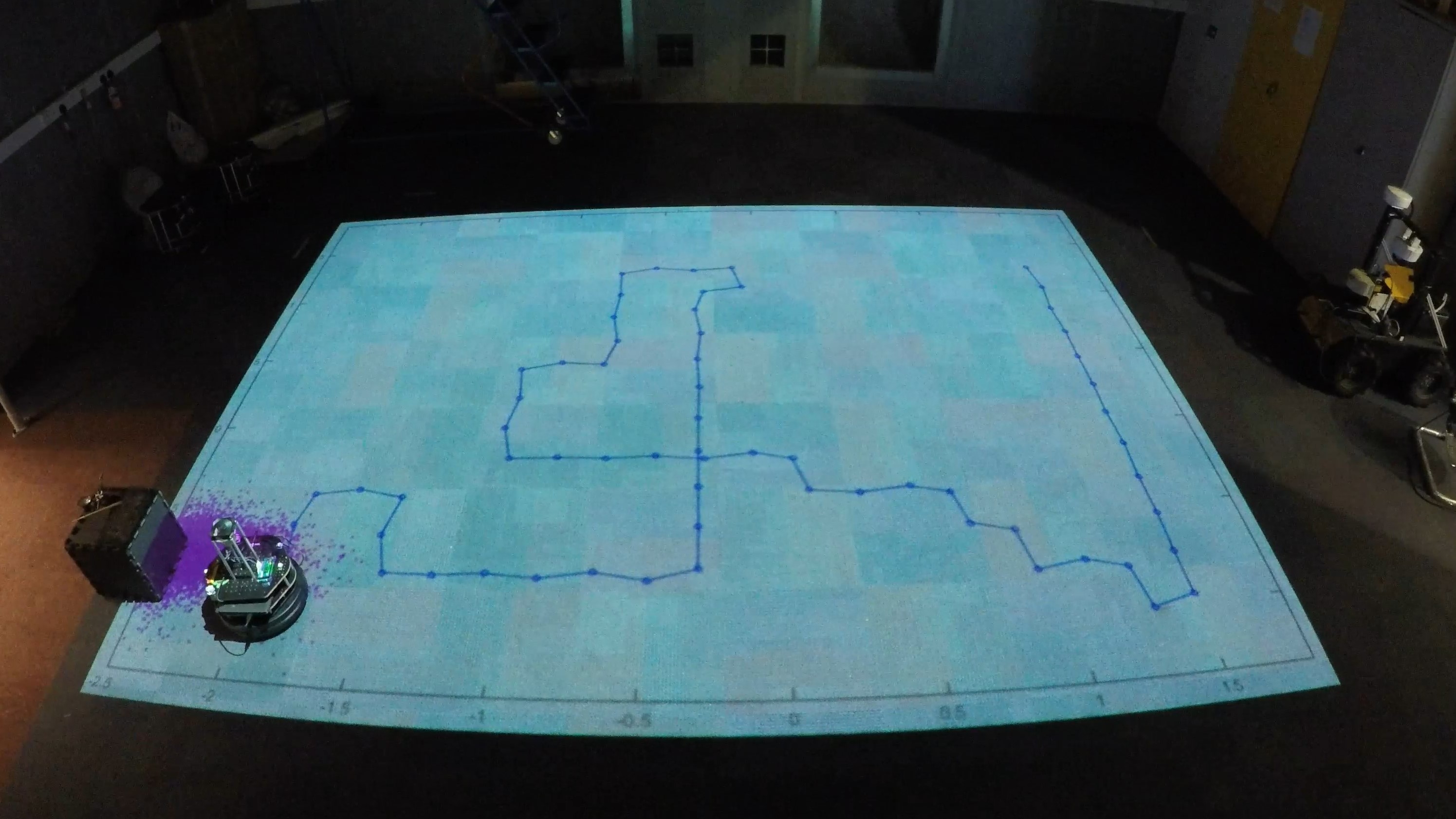
Information-based search for an atmospheric release using a mobile robot: Algorithm and experiments
IEEE Transactions on Control Systems Technology, vol.27, pp. 2388-2402. (2018)